
移动机制旨在帮助用户在虚拟现实环境中穿行,并且是所有VR应用的核心设计功能之一。若你要允许用户进入一个明显大于实际物理空间的虚拟世界,提供舒适的移动机制至关重要。例如,远程传送是VR的一种常见移动方式。通过特定触发手段,远程传送可以允许用户从A点快速移动到远方的B点。
在早前一份名为名为“Virtual reality locomotion via hand gesture”的专利申请中,Meta就提出了一种拇指与食指捏合来发起远程转送的机制。其中,手心向上,五指张开,然后拇指和食指捏合。
在日前发布的另一份名为“Artificial reality teleportation via hand gestures”的专利申请中,这家公司又提出了另一种远程转送发起手势:手掌卷起拳头状,手臂抬起且手背向上,然后拇指向外伸出。
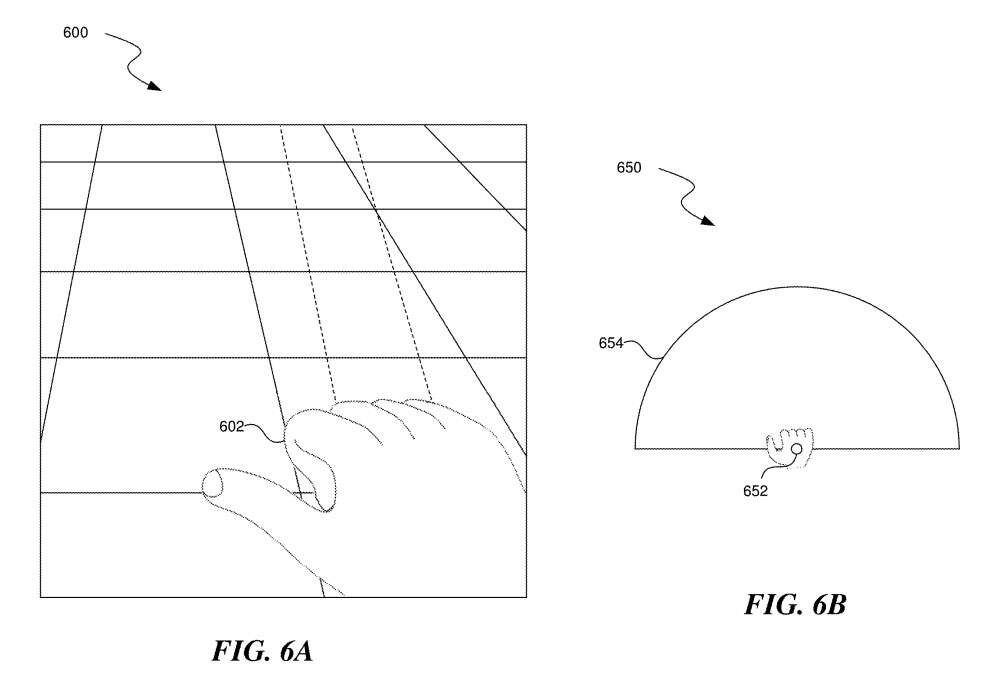
对于远程传送,系统可以通过摄像头检测用户的手势来识别用户是否发起了远程传送开始手势。在一个实施例中,传送开始手势602可以是四个手指卷曲成拳头,拇指伸出,且用户的手心朝下。图6A示出了这种远程传送开始姿势602。当识别出远程传送开始姿势时,系统可以在远程传送开始姿势的识别位置设置第一原点。
在图650中,通过在进行远程传送开始姿势602的第一原点652来说明设置第一原点。第一原点可以是进行远程传送开始姿势602的开始位置,并且用户从所述开始位置开始移动他的手。在一个实施例中,可以使用第一原点作为参考位置,以与未来用户手部运动的位置进行比较。
图6B同时示出了操作半径654,其示出了用户可以在保持远程传送开始姿势的同时移动手部以移动相应的潜在目的地点位置。当用户保持远程传送开始姿势时,系统可以继续检测用户手势。
然后,系统可以在人造现实环境中显示潜在目的地点(在环境700中由图7A的潜在目的地702示出)。潜在目的地点的位置可以基于第一手位置与第一原点的第一比较。
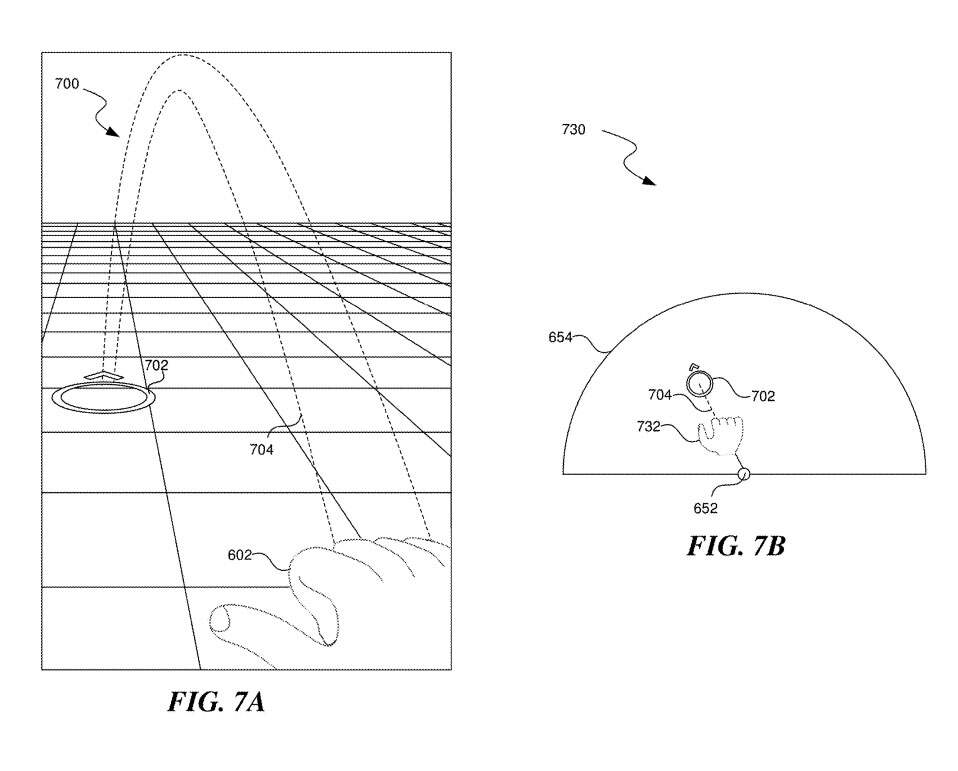
图7B示出了手部位置732与操作半径654中的第一原点652的比较。在一个实施例中,潜在目的地点702与第一原点652和手位置732之间的距离具有指数、线性或对数关系。潜在目的地点702可以通过射线704接到手位置732。例如,过程500可以将弯曲的、成角度的向下光线从用户手部投射到目标点。在一个实施例中,可以使用其他类型的射线,例如直线射线或弓形射线,例如弓形射线704。
在一个实施例中,当潜在目的地点在热点的阈值距离内时,潜在目的地点将自动移动到预定义位置(可称为“热点”)。下面的图10、11A和11B讨论了关于将潜在目的地点移动到热点的细节。
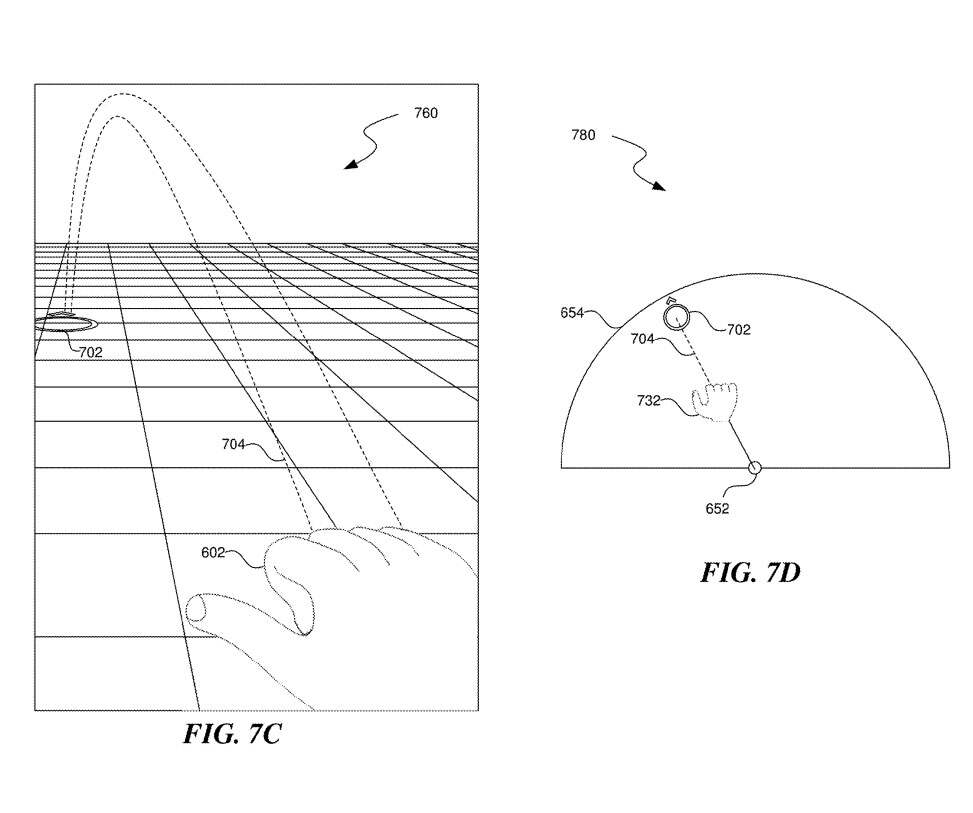
图7C的环境760和图7D的环境780示出了潜在目的地点702与从第一原点652到手部位置732的距离具有指数关系的示例。例如,手部位置732和潜在目的地点702之间的距离可以指数地大于手部位置7322到第一原点652的距离。
在另一示例中,所述关系可以是对数关系,其中第一原点652与手部位置732之间的额外距离令手部位置732和潜在目的地702之间的距离的变化越来越小。这样的对数关系可以防止远程传送走得太远,从而可以更精确地控制目的地的选择。在另一个例子中,关系可以是线性关系。
系统可以基于检测的用户手势来识别目的地选择手势。例如,目的地选择手势可以包括用户在保持四个手指卷曲成拳头,同时拇指按压食指,例如图8A的手势802。
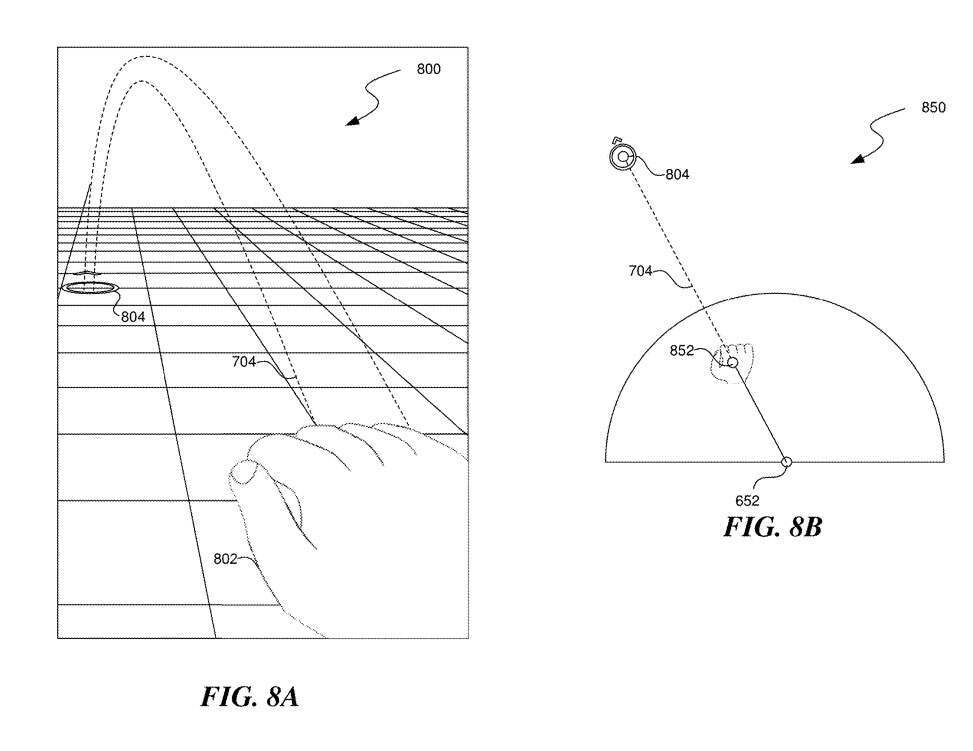
这时,系统可以根据目的地选择手势来选择目的地。图8A示出了基于当前潜在目的地点702来选择环境800中的目的地点804的目的地选择手势802。
然后,系统可以在用户执行目的地选择手势的位置设置第二原点。第二原点可以是新的起始位置,用户从所述位置开始移动手部以指示目的地定向,即用户在传送之后将面对的朝向。
所以,系统可以使用第二原点作为参考位置,以比较用户手部在第二原点周围的运动的位置,从而确定目的地点处的定向。图8B示出了响应于目的地选择手势802设置第二原点852和目的地点804的示例。
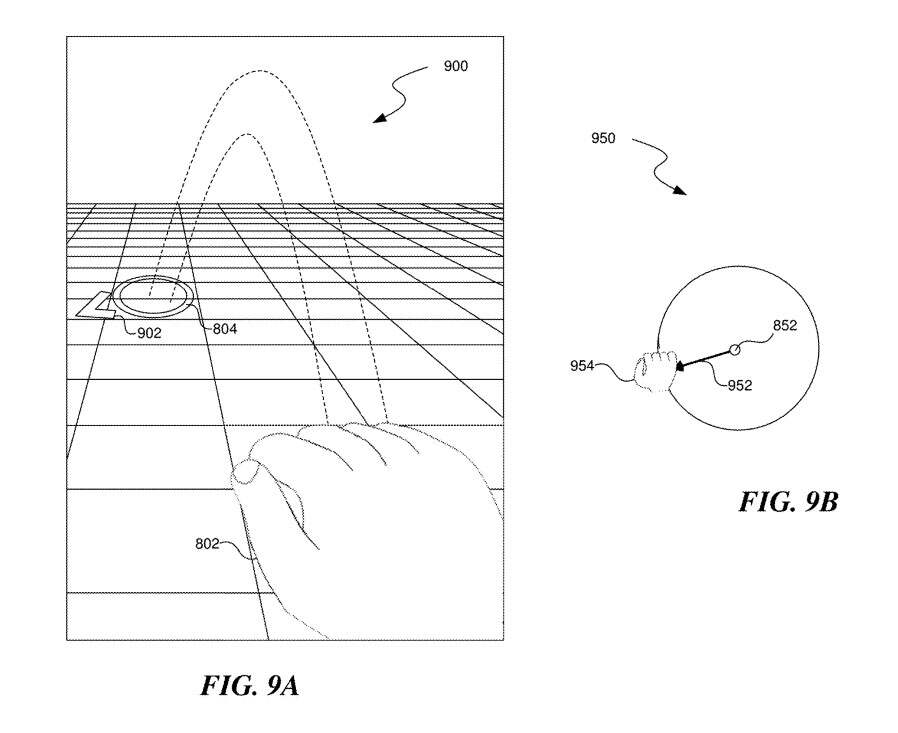
图9A示出了环境900中的目的地点804的目的地定向902。在一个实施例中,用户可以通过相对于第二原点移动手部来改变目的地定向。如图9B所示,目的地选择手势802相对于第二原点852定位在954(如箭头952所示)。
系统可以基于检测的用户手势来识别移动手势。例如,移动手势可以是释放目的地选择手势,例如张开用户一直握着的拳头。在一个实施例中,手势由用户的一只手或两只手执行。例如,用户可以用一只手执行手势以选择目的地点,并且可以用另一只手进行手势以选择目标方向。
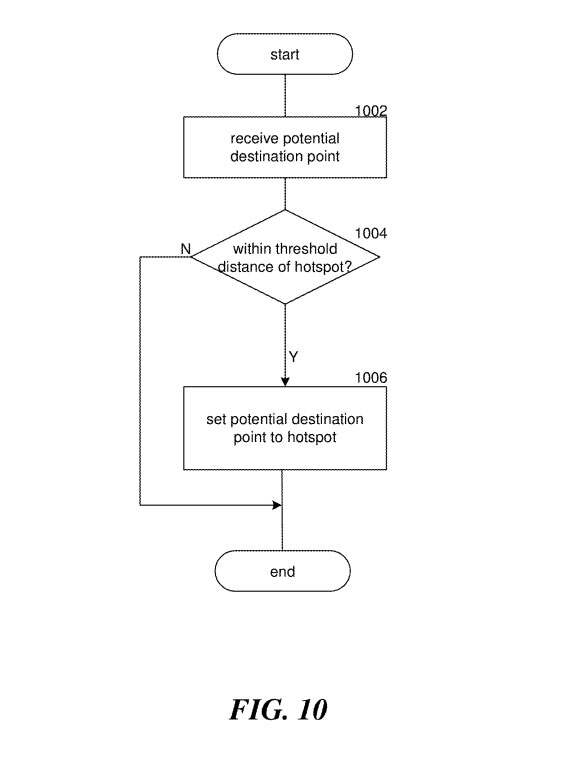
图10示出了远程传送到定义位置的过程1000。
在1002,可以接收潜在目的地点的指示。
在1004,可以确定所指示的潜在目的地点是否在热点的阈值距离内。如果所指示的潜在目的地点在热点的阈值距离内,则过程1000可以继续到1006,否则过程1000可以结束。
在1006,可以将潜在目的地点设置为热点。在一个实施例中,热点可以具有为其预设的默认目的地方向。
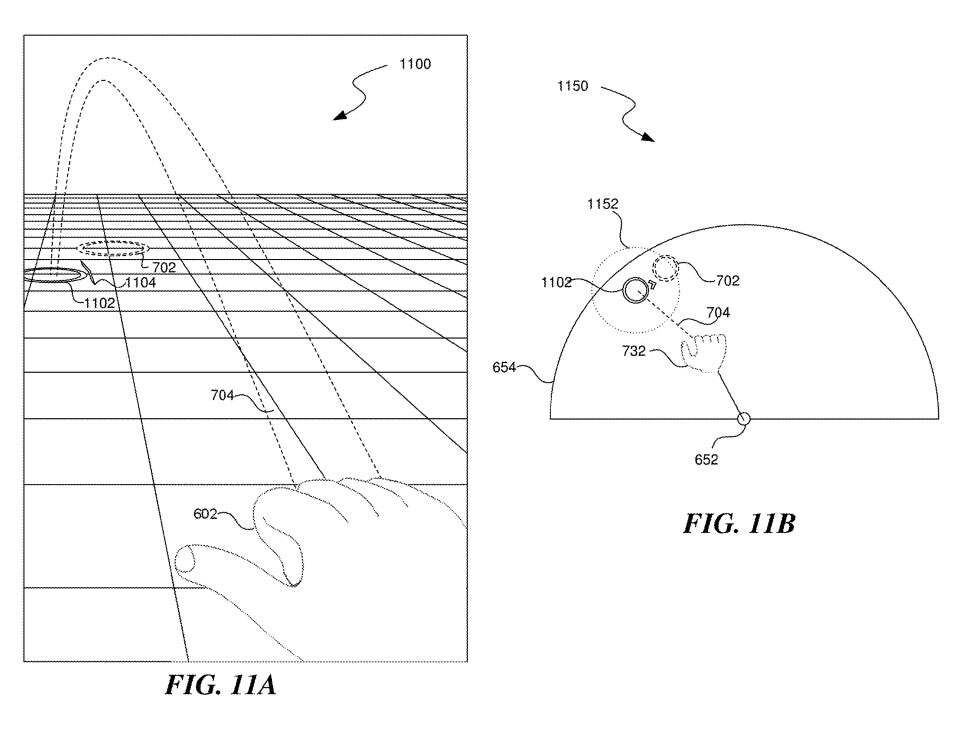
如所示图11A,系统根据第一远程传送姿势相对于原点的放置来设置远程传送命令的潜在目的地点,并将其移动到热点。图11B则是相对于原点将第一远程传送姿势定位在第一操作半径内,并移动到热点以设置远程传送命令的潜在目的地点。
在1100中,用户保持远程传送开始手势602,使得远程传送系统向潜在目的地点702投射光线704。但在所述示例中,潜在目的地点702位于热点1102的阈值距离内,热点1102具有默认目的地方位1104。所以,潜在目的地点移动到热点1102。
在1150中,可以看出,潜在目的地点702在热点1102的阈值距离1152内,使得潜在目的地点将移动到热点1102。
远程传送系统继续监视现在指示的点702。如果指示点702移动到阈值距离1152之外,则潜在目的地点将快速返回到指示点702。在各种实施例中,所指示的点702可以具有或可以不具有向用户显示的视觉组件。在选择热点作为目的地点时,默认目的地方位1104自动选择为目的地方位,并且远程传送系统将用户移动到面向默认目的地方向1104所指示的方向的目的地点1102。
相关专利:Meta Patent | Artificial reality teleportation via hand gestures
名为“Artificial reality teleportation via hand gestures”的Meta专利申请最初在2021年7月提交,并在日前由美国专利商标局公布。























 产品与服务
产品与服务
 联系站长
联系站长
 关于我们
关于我们